
2018年第16期 【特别关注】民用无人机协同的关键技术及发展现状

一、背景与概述
随着上世纪90年代自动控制技术的进步及传感器性能的提高,无人机开始迈入民用航空市场。2010年,Parrot公司推出了第一款消费级多旋翼无人机AR.Drone。从此,民用无人机市场开始了快速扩展。民用无人机市场规模从2012年约0.7亿美元增长至2017年约61亿美元。近两年无人机市场的增长更是进入快车道(如表1所示)。据美国蒂尔集团预测,全球军民无人机销售额在2024年将达115亿美元,未来10年支出总额将超过910亿美元,年复合增长率为6.7%。美国《航空与太空技术周刊》预测,未来10年全球无人机市场规模将达到673亿美元,大约356亿美元将用于生产,287亿美元将用于技术研发和实验设计,维护服务约30亿美元。

表1 近两年全球民用无人机市场规模
民用无人机市场扩张迅速,但是单台无人机可靠性和载荷能力总是有限,多无人机协同技术应运而生。宾夕法尼亚大学的VijayKumar教授提出未来无人机发展的5S趋势理论:Small(小型),Safe(安全),Smart(智能),Speed(敏捷)和Swarm(集群)。其中集群就是指让多个无人机协作,完成个体无法胜任的任务。INTEL公司率先进行了多无人机协同编队展示,在近五年时间里分别进行了100架、300架、500架、1200架无人机协同编队的灯光秀(如图1所示)。

图1 INTEL公司的历年灯光秀
消费级无人机在多机协同上的成功极大地刺激了专业级无人机在该技术的进步。随着谷歌公司ProjectWing无人机货运体系的推进,多无人机协同运输也开始进入行业专家的视野。洛桑联邦理工学院的智能系统实验室开发一套可以在灾区快速搭建通信网络的微型飞行机器人群。该集群成本低、部署简便、使用灵活,为应急救援的通信保障提供了一种灵活的解决方案。新加坡SwarmX公司开发了HiveMind无人机操作系统,该系统是基于目标的集群管理,利用机器学习算法,集群的指挥者可以指挥无人机监视哪些区域,软件可以推算出如何有效地部署集群中的成员无人机。这些新的思路将带来DaS(Drones-a-Service)这种新的商业模型的出现。新的商业模式意味着多无人机协同技术不仅仅只是一场“没有硝烟”的灯光秀,它将对未来民航业的发展带来“有硝烟”的变革。变革的程度依赖于无人机协同技术能够发展到哪一步。
二、无人机协同关键技术
多无人机协同是指多架无人机通过搭载传感器感知周围环境信息,同时通过信息链路实现无人机之间的信息融合,利用飞行管理计算机对各种任务进行分配和决策,进而生成航迹规划。然后依赖飞行控制计算机调整单个无人机姿态,以实现航迹规划、任务的完成。图2为多无人机协同内部逻辑图。
从当前国际无人机公司技术发展来看,为了实现多无人机的协同,需要攻克以下四大技术难点:多无人机多目标的任务分配技术、动态环境下的轨迹规划技术、分布式多无人机编队技术、复杂环境下无人机识别感知技术。

图2 多无人机协同内部逻辑
■任务分配技术
多架无人机在执行任务时,往往面对的是多个目标。如何根据任务的需求,合理地把不同的目标分配给不同的无人机是进行多无人机协同的关键技术。就无人机类型而言,当前研究的重点从同构无人机(即无人机型号相同)转向异构无人机(即无人机型号不一致,甚至可以是旋翼无人机和固定翼无人机)。就协同方式而言,当前研究的重点从集中式协同(即有确定的长机,僚机服从长机指挥)转向了分布式协同(即没有确定的长机),这使得任务分配技术更贴合实际使用。
麻省理工学院航空航天系HebaA.Kurdi团队应用蝗虫弹性行为建立启发算法,用以解决动态环境下任务分配中每个UAV操作状态和任务参数;首尔国立大学的YoudanKim团队针对有通信范围限定的动态环境中的,应用基于市场分散算法求解多无人机的任务分配;康奈尔大学NoamBuchman团队根据捆绑算法用于解决时间敏感环境下多无人机任务重分配问题。
可见,当前任务分配方向的研究多集中于提供新的算法来更快地求解动态环境下的任务分配模型。随着人工智能研究的深入,大量的智能算法被用于求解这一问题。这将极大提高无人机在线处理突发情况的能力,有助于多无人机协同被应用于更广阔的领域。
■航线规划技术
随着无人机执行任务环境越来越复杂,多无人机在进行协同作业时必要考虑的问题就是如何根据作业环境和作业需求进行航线规划。航线规划技术要求无人机能够使用较短时间、较小代价飞行较大的航程、完成更多的任务。
英国诺森比亚大学Kothari团队采用机会约束方法处理飞行环境中的不确定性,再通过快速搜索树方法获取最优路径;加拿大魁北克大学的Berger团队针对异构飞行器在静态目标搜索航线规划中,采用二次规划模型降低了求解难度;土耳其的UgurCekmez团队对基本的蚁群算法进行改进,提出了多蚁群算法。为了提高计算速度,所提出的算法在并行计算平台上实现。实验结果表明了该方法在不同情景下的求解效率都很高。与UgurCekmez团队类似,西班牙马德里自治大学的CristianRamirez-Atencia团队应用了多目标遗传算法用来解决复杂环境下多无人机航迹规划问题。
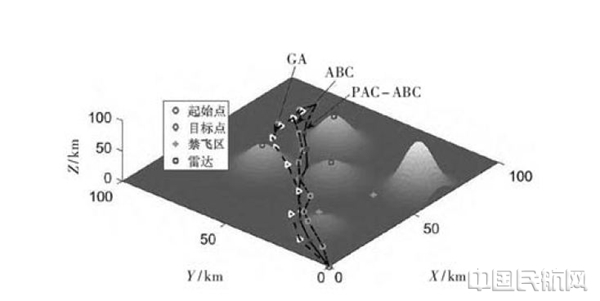
图3 不同的算法航线规划的结果不同
对于多无人机而言,复杂航线规划技术还在研究阶段。虽然众多学者提出了丰富的数学模型和求解算法,但究竟哪个算法更成熟,目前尚没有定论(如图3所示,三个算法航线规划的结果各不相同)。因此,现阶段还没有成熟的在线多无人机协同航迹规划技术投入商业使用。
■编队控制技术
多架无人机在执行任务时需要以一定的队形飞向任务区域。对于多机协同编队而言,首先要避免编队内相撞的问题,其次需要根据任务环境、任务目标的改变而改变队形。这需要成熟可靠的编队控制技术来实现多无人机的编队飞行。编队控制技术核心工作在于队形设计和队形动态调整两个方面。主要应用技术方法有:Leader-Follower法、虚拟结构法、图论法等。其中Leader-Follower法已经比较成熟,广泛应用于商业地面站软件中,Missionplanner、QGroundControl软件中有相应模块可以开发。
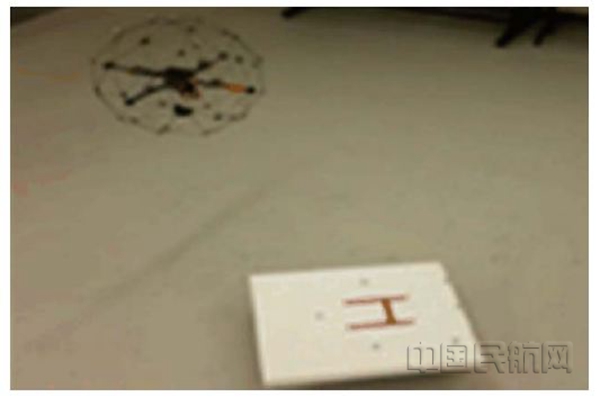
图4 地面机器人与无人机的编队
与此同时,编队控制从先前的二维层面向三维层面扩展,伊朗德黑兰理工学院(AUT)航空航天工程系的HassanHaghighi提出了一个分层框架,使用指导和控制调节器在三维编队机动中进行协调跟踪。由于这种方法计算复杂度低,使多无人机编队能够在遇到突发情况后进行有效的编队控制。除了实现无人机与无人机之间的编队,学者们还进行了无人机与地面机器人编队的研究。加拿大康戈迪亚大学的Ghamry利用滑模控制方法实现了图4所示的地面机器人与无人机的协同编队。
编队的控制,是当前多无人机协同技术中最为成熟的领域。即便如此,当出现面临干扰、突发情况、单个无人机平台故障等情况时,当前的技术还是不能有效应对。
■识别感知技术
无人机自主能力越高,其识别感知技术就越好。多机协同的实现就要求无人机要具备较好的识别感知技术。识别感知首先要求无人机传感器性能可靠。因此,国外诸多公司在这一领域投入了大量精力,也取得了相应的成果。目前应用比较多的感知技术如表2所示。
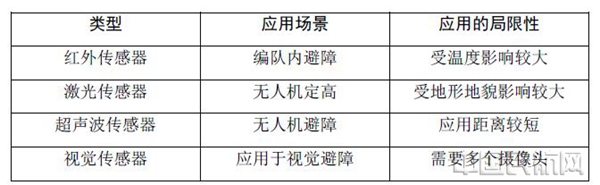
表2 无人机常见识别传感器
在提高硬件水平的同时,多无人机协同编队中的识别技术又要求相应的识别算法具有较好的鲁棒性。随着卷积神经网络的应用,视觉识别算法成为研究的热点。
谷歌公司就应用机器学习技术提高无人机识别效果。芝加哥大学的JohnTisdale就建立了基于概率密度的非线性传感器模型,该模型通过对已知数据分析从而对传感器探测结果进行预估,提高了传感器探测效率。法国航空航天实验室的MartialSanfourche应用单目摄像头使用扩展卡尔曼滤波算法预估分布式多无人机协同编队中各无人机的位置和方向。
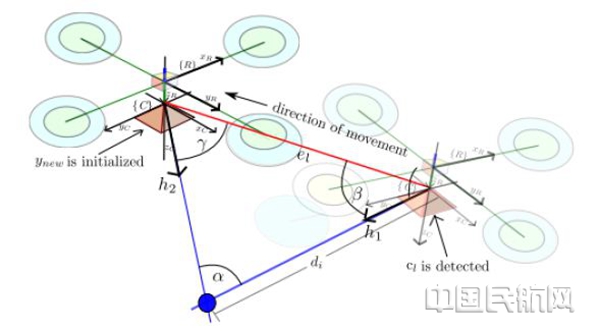
图5 无人机通过视觉识别实现位置变化
当前识别感知技术在旋翼机上应用的较为广泛。固定翼飞机由于飞行速度快,不能空中悬停,识别感知技术的应用受到了限制。
三、启示与小结
多无人机协同作业是无人机应用形式的新变革,这场变革将加速航空器无人化的进程。国外企业高校在这一领域已经做了大量工作,无人机市场也有从百家争鸣逐渐走向寡头垄断的趋势。相对于传统民航技术,我国在这一领域的积累反而更深厚一些。因此做好市场调研,摸清国内外技术差距,对于抢占无人机协同领域的优势地位很有必要。
多无人机协同的应用是一个新的事物,但是其背后的基本原理并不新鲜,在多无人机协同中广泛应用的智能算法其实早已在机器人领域应用。视觉识别技术也在图像处理领域得到应用。由此可见,抓好基础理论的应用是进行多无人机协同研究的基础。由于一些技术在别的领域已经得到应用,所以开展适当的技术迁移能够使得无人机行业技术发展更快。
就协同技术而言,军用无人机的多机协同应用经验更多、技术也更先进一些,加强加快军用无人机协同技术的外溢很有必要。例如:谷歌公司无人机识别技术来源于美军DARPA项目的成果。欧洲各大高校民用无人机协同技术的研究也得到北约的经费支持。我国军用无人机协同技术也走在民用无人机的前面,国防科技大学、中国航空工业集团611所,都在多无人机协同搜索攻击领域有所建树,开展军民合作既有效利用了资源,又加速了民用无人机多机协同技术的进步。
现阶段,一个新兴领域从实验室到走向市场需要的时间越来越短。多无人机协同领域,各国都在加大投入,虽然当前技术多在实验阶段,但可以预见越来越成熟的多无人机协同技术将出现在未来民用航空市场上。(供稿:岳源)
